
Wir sind das Team HTWK Smart Driving der Hochschule für Technik, Wirtschaft und Kultur Leipzig. Als studentische Forschungsgruppe beschäftigen wir uns mit Technologien rund um das autonome Autofahren. Schaut gerne bei uns vorbei!
Am 3. März 2025 veranstaltete das Smart Driving Team der HTWK Leipzig einen Hackathon rund um autonomes Fahren. In entspannter Atmosphäre trafen sich Teammitglieder und interessierte Neueinsteiger, um gemeinsam bis in die Nacht an spannenden Projekten zu arbeiten und neue Technologien kennenzulernen. Für ausreichend Mate und frische Pfannkuchen war selbstverständlich gesorgt.
Ein wichtiger Schwerpunkt lag auf der Einführung in ROS2 (Robot Operating System) und die Simulation mit Gazebo. Neue Mitglieder konnten erste praktische Erfahrungen sammeln und sich unter Betreuung unserer erfahrenen Smart Driver mit den Grundlagen der Software vertraut machen.

Parallel dazu wurde fleißig an unseren 2WD-Autos gebastelt. In lockerer Runde wurde geschraubt, gelötet und optimiert, um die Fahrzeuge für kommende Einsätze fit zu machen. Besonders dabei ist, dass alle 2WD-Autos mit Lidar ausgestattet sind, wodurch uns viele neue Möglichkeiten eröffnet werden.

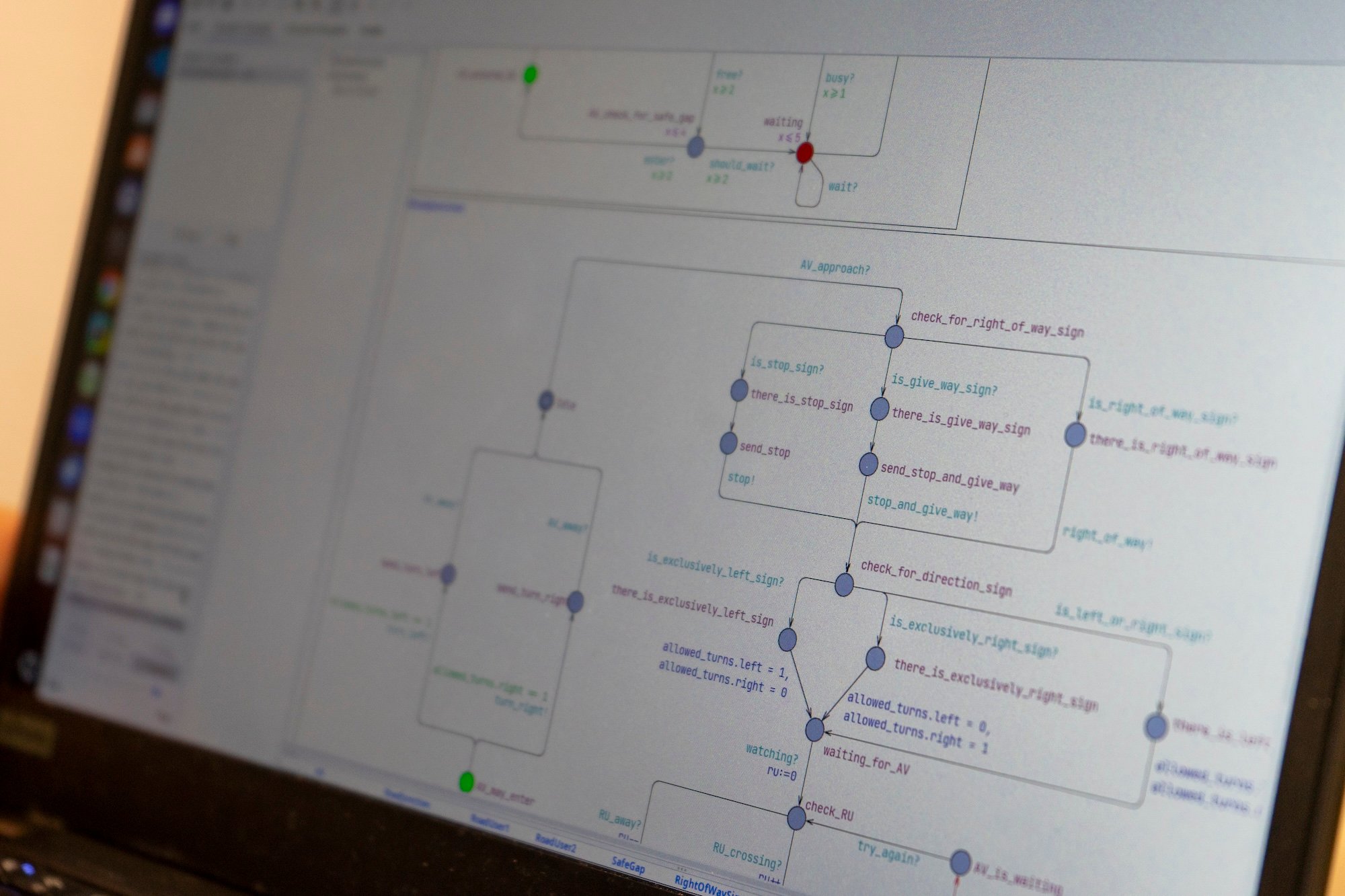
Im Bereich Verifikation wurden erste Ansätze vorgestellt, wie sich Fahrstrategien perspektivisch durch verifizierbare Modellen in Model Checkern wie UPPAAL unter Verwendung von temporaler Logik absichern lassen.
Im Laufe des Hackathons bekamen wir Besuch von der Pressestelle der HTWK Leipzig, die einen Artikel im Hochschulmagazin Einblicke über unsere Arbeit im Smart Driving Team veröffentlichen möchte. Wir freuen uns über das Interesse und haben die Fahrzeuge gerne präsentiert.
Das Smart Driving Team bedankt sich bei allen Teilnehmerinnen und Teilnehmern für die tolle Stimmung und freut sich über alle, die Lust haben, beim nächsten Mal wieder mitzumachen oder einfach einmal reinzuschnuppern!