Wir sind das Team HTWK Smart Driving der Hochschule für Technik, Wirtschaft und Kultur Leipzig. Als studentische Forschungsgruppe beschäftigen wir uns mit Technologien rund um das autonome Autofahren. Schaut gerne bei uns vorbei!
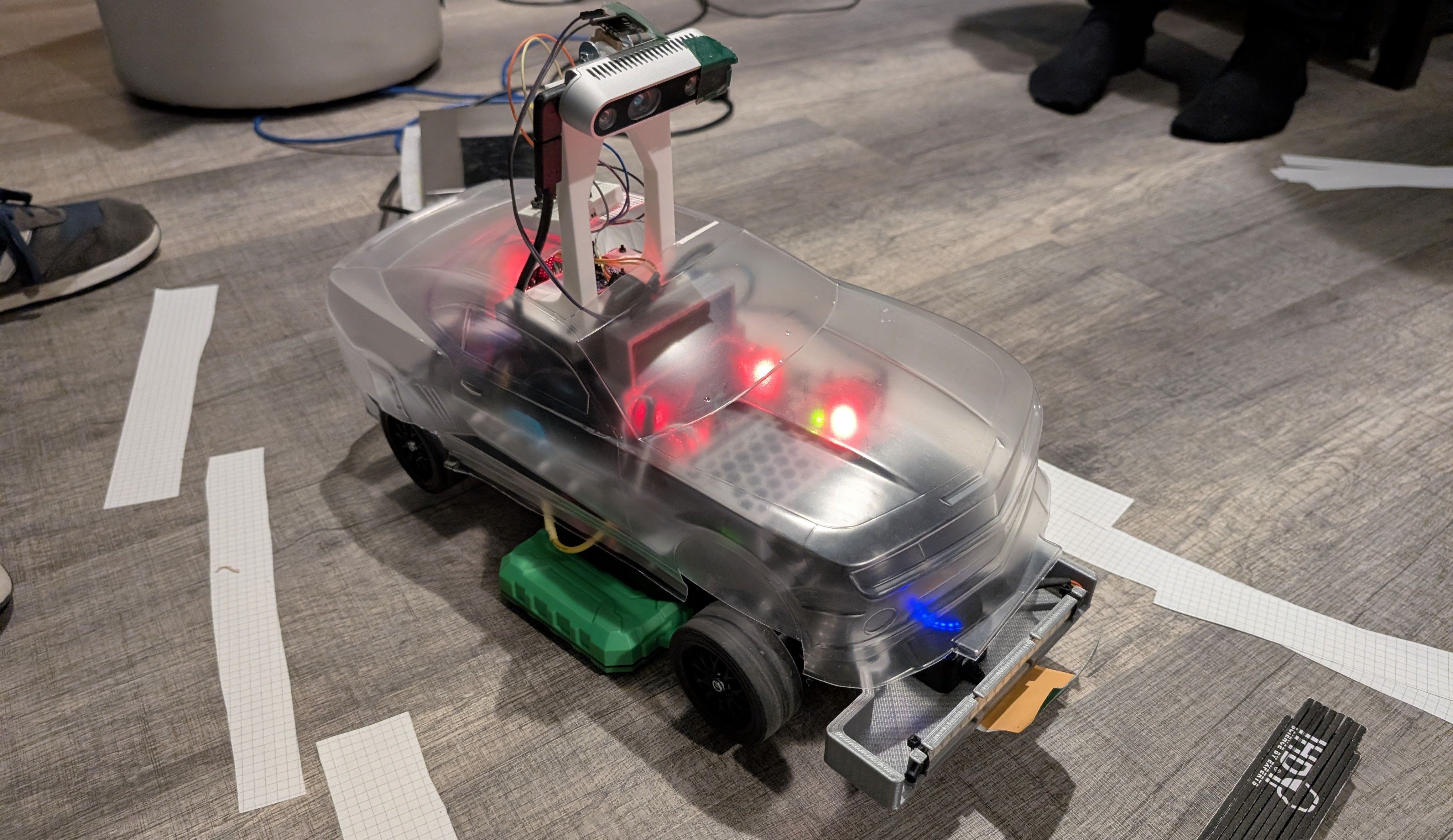
Mit der Fertigstellung unserer neuen Fahrzeugplattform Ros Racer Anfang des Jahres stand einer Teilnahme an der CauDri Challange 2026 nichts mehr im Weg – außer die fast vollständig fehlende Software. Dessen Entwicklung begann im März anzulaufen und nahm ab April volle Fahrt auf. Unsere Kerngruppe aus sechs Studierenden sah sich zuerst mit der uns unbekannten Softwareumgebung ROS2 konfrontiert, welche einiges an Einarbeitungszeit verlangte. Im Kontrast dazu stand das Ziel eine vollständig funktionsfähige Software in nur vier Wochen zu entwickeln. Erschwerend über allem schwebten knappe Hardwareressourcen in Form eines Raspberry Pi 5, der auf dem Racer als zentrale Recheneinheit verbaut ist.
Wir sprangen also am tiefen Ende ins Becken und verteilten uns auf spezialisierte Bereiche der Entwicklung. Jeder in unserer Gruppe wurde der Bildverarbeitung, hardwarenahen Entwicklung oder abstrakten Logik zugeordnet. Die so gewonnene Teamstruktur ermöglichte uns eine effiziente Parallelisierung der Arbeit. Viele unvorhergesehene Komplikationen sollten diese feine Trennung jedoch bald wieder aufbrechen und hohe Flexibilität von uns fordern.
Die Simulation und die Wirklichkeit – zwei Paar Schuhe
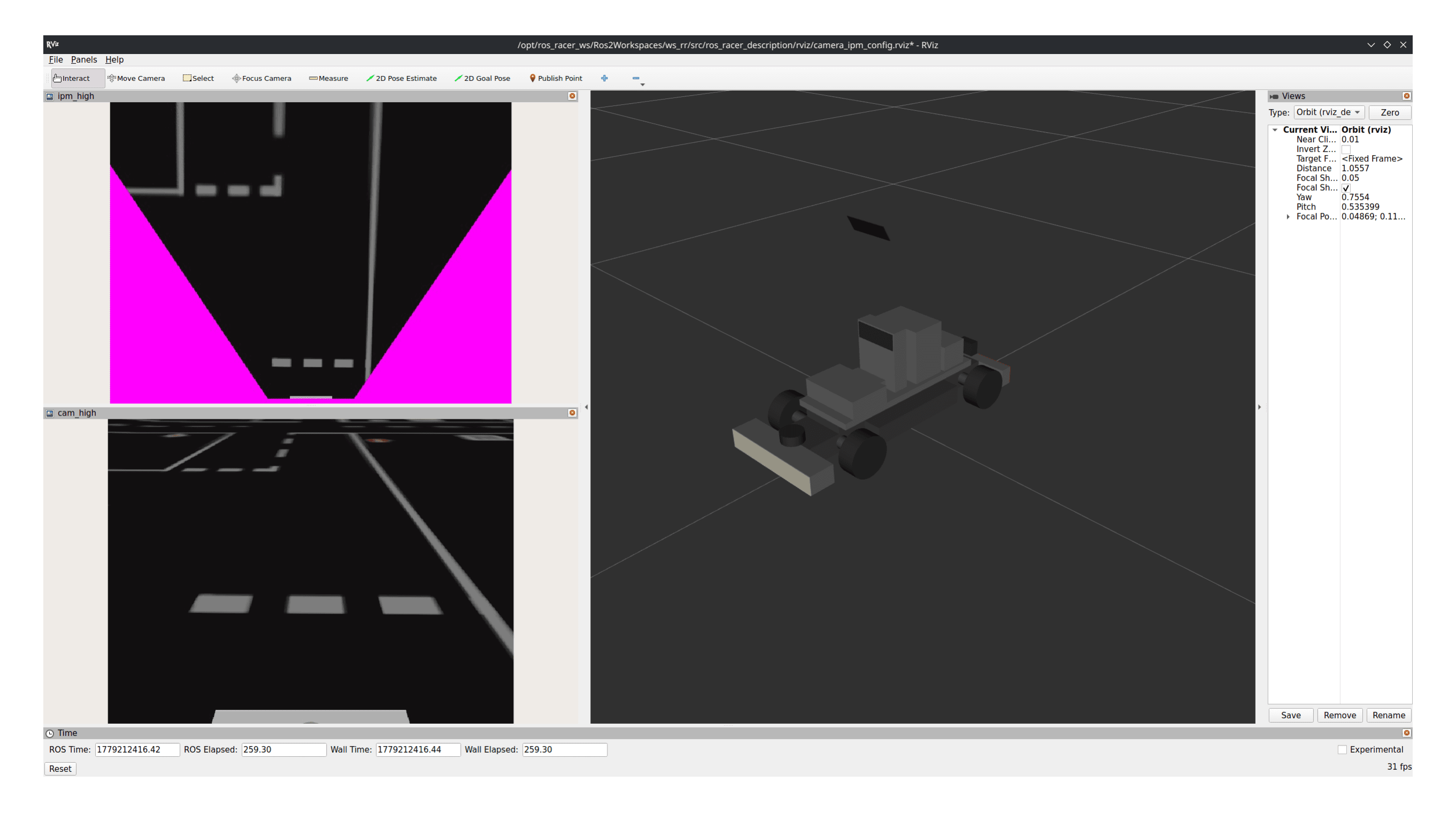
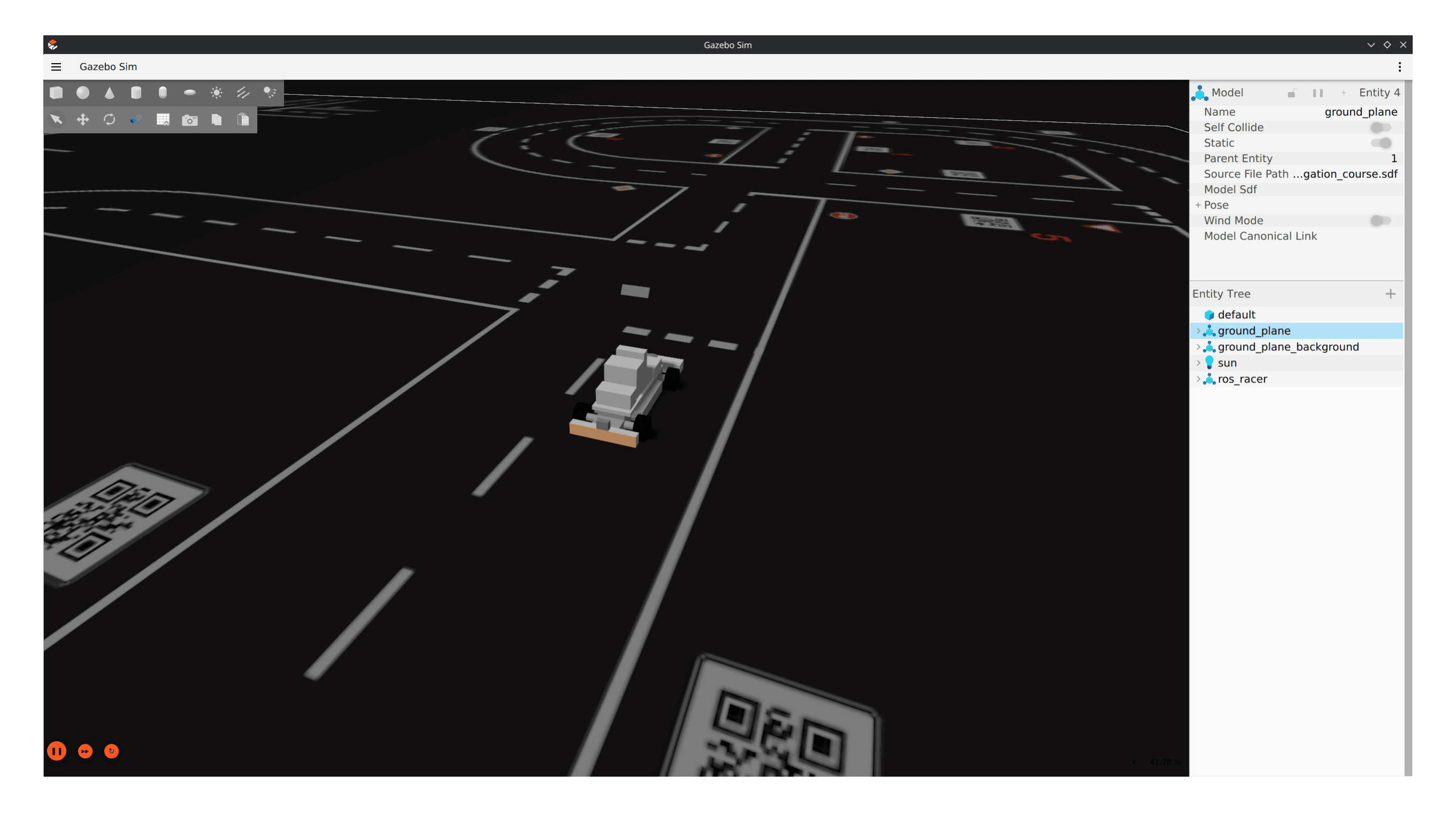
Zum Testen unserer Algorithmen nutzen wir die Simulationsumgebung Gazebo. Anders als 3D Umgebungen für z.B. Spiele, legt Gazebo großen Wert auf die detailgetreue Nachbildung der Realität. Dies schließt unter anderem die Simulation von physikalisch bedingter Reibung, Massenträgheit und Lichtreflexionen mit ein. Die Konfiguration solch komplexer realitätsnaher Wechselwirkungen benötigt jedoch beachtliche Zeit, die kurz vor dem Wettbewerb rar war. Um den Fokus auf das Wesentliche nicht zu verlieren, entschieden wir uns daher, die Simulation vorerst einfach zu halten – ein folgenschwerer Entschluss z. B. für das Testen Spurhaltung. Diese funktionierte in der Simulation zuverlässig, obwohl sie in der auf dem echten Auto nicht fahrfähig war. Die von den Kameras aufgezeichneten Bilder in der Theorie und der Praxis wichen schlicht zu stark von einander ab. Während das reale Auto von zahlreichen Artefakten und Spiegelungen in der Aufnahme geplagt wurde, sah die Simulation tadellos aus. Mit dieser Erkenntnis wurde klar: Ein guter Algorithmus für den Spurassistenten wird weit komplexer als wir bisher angenommen hatten. Gleiche Schwierigkeiten traten bei der Erhebung von Odometriedaten und der Motorsteuerung auf. Die Schätzungen des noch bevorstehenden Arbeitsaufwandes wurden in Folge dessen nach oben korrigiert und die Nächte im Büro wurden länger.
Trotz aller Komplikationen hat sich unser Teamwork und unsere Motivation ausgezahlt. Obgleich wir im beschränkten Zeitrahmen vielleicht nicht die beste Lösung entwickelt haben, waren wir am Ende fahr- und wettbewerbstauglich, was unsere Vorfreude auf die Teilnahme noch einmal erhöhte.