
Wir sind das Team HTWK Smart Driving der Hochschule für Technik, Wirtschaft und Kultur Leipzig. Als studentische Forschungsgruppe beschäftigen wir uns mit Technologien rund um das autonome Autofahren. Schaut gerne bei uns vorbei!
Mit dem RosRacer entsteht beim SmartDriving Team der HTWK Leipzig eine neue Fahrzeugplattform für das autonome Fahren im Modellmaßstab. Die Motivation hinter dem Projekt ist klar: Für Forschung, Erprobung und studentische Entwicklung wird ein Fahrzeug benötigt, das modular, kosteneffizient und flexibel einsetzbar ist. Gleichzeitig soll es als verlässliche Grundlage für zukünftige Teammitglieder dienen, damit weitere Fahrzeuge einfacher nachgebaut und weiterentwickelt werden können.
Ein wichtiger Anlass für den Bau war außerdem die Perspektive, mit einer eigenen Plattform an Wettbewerben im Bereich autonomes Fahren teilzunehmen. Besonders die Anforderungen der CAuDri-Challenge flossen in die Entwicklung ein. Deshalb wurde der RosRacer bewusst als 1:10-Fahrzeug mit Ackermann-Lenkung ausgelegt – also in einer Form, die sich eng an realen Straßenfahrzeugen orientiert und für viele Wettbewerbsszenarien besonders geeignet ist.
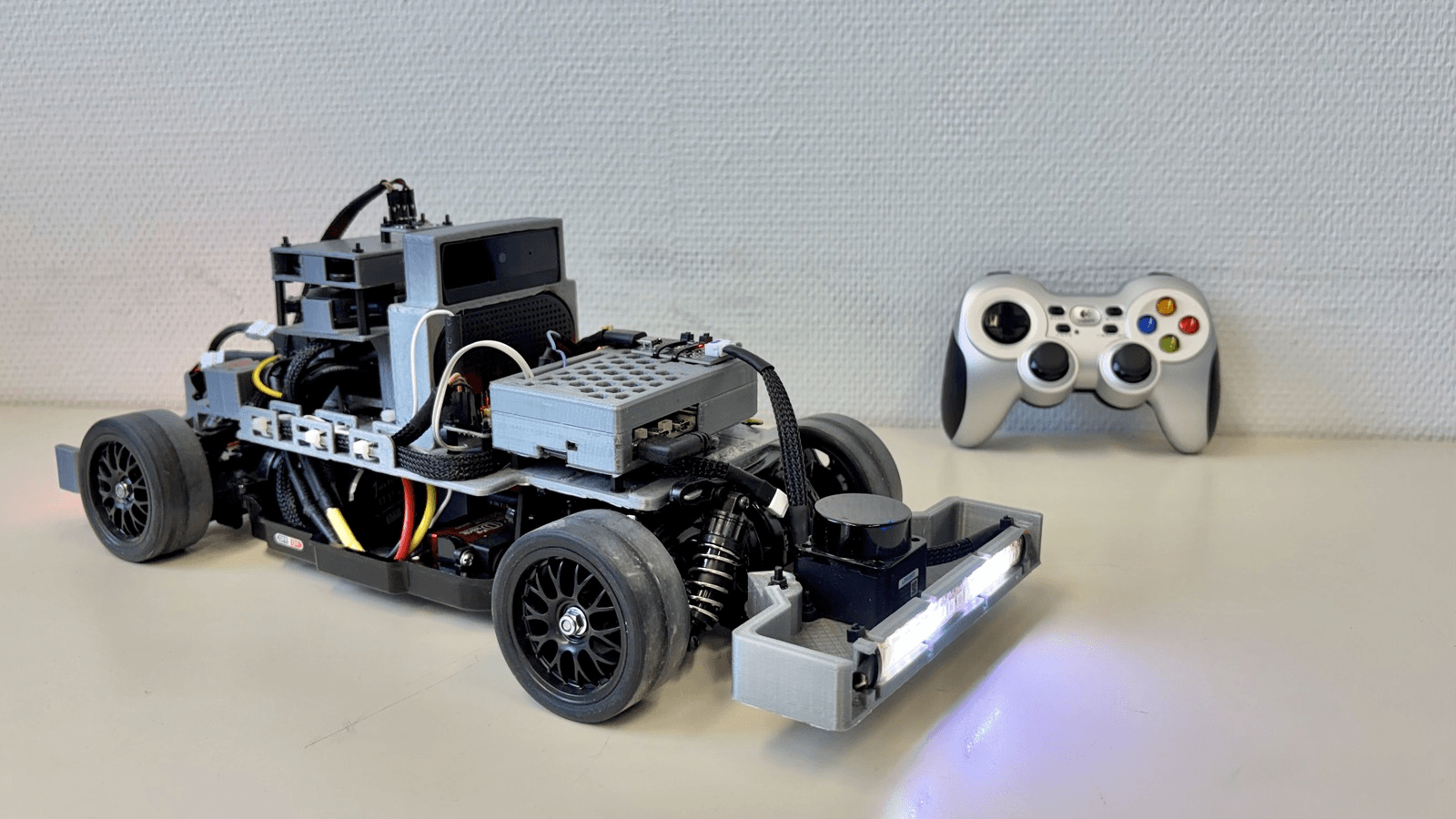
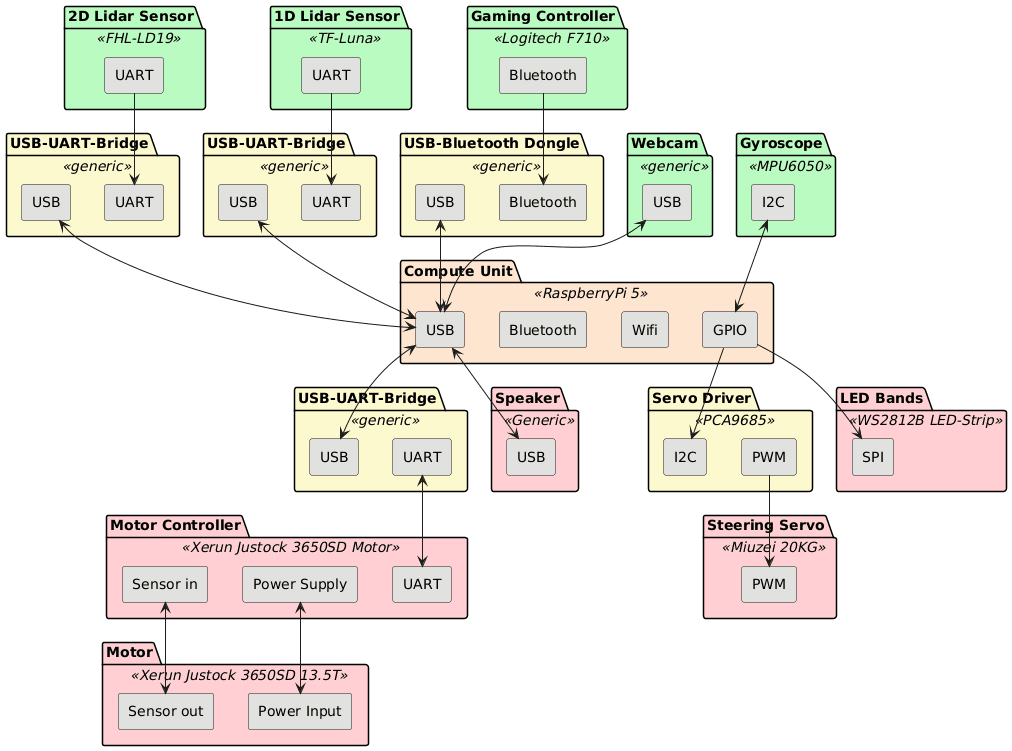
Die Plattform kombiniert ein erprobtes TT-02-Chassis mit eigens entwickelten CAD-Bauteilen, einer zentralen Recheneinheit auf Basis eines Raspberry Pi 5 und einer Sensorik, die auf präzisere Umgebungserfassung ausgelegt ist, ähnlich zum Sedenius Auto. Statt auf Ultraschall zu setzen, kommen jedoch LiDAR-Sensoren zum Einsatz. Ergänzt wird das System durch Kamera, leistungsstärkere Lenkung und eine aufgeräumte elektrische Architektur.
Langfristig kann die Plattform auch den Einsatz mehrerer Fahrzeuge im Verbund ermöglichen und damit eine Grundlage für kooperative Fahrmanöver schaffen.